
Brief Bio:
I am a postdoctoral scholar in Paul G. Allen School of Computer Science & Engineering at the University of Washington, working with Prof. Dieter Fox in the Robotics and State Estimation Lab.
My research focuses on Perception for Goal-directed Mobile Manipulation. Specifically, I am developing algorithms that can enable a personal robot to perceive objects in cluttered scenes in order to perform goal-directed household tasks. My research interests lie primarily in robot perception under uncertainty (my Michigan AI blog post). Broadly towards solving problems in robotics, computer vision and machine learning.
Previously, I completed my Ph.D. in Computer Science and Engineering from the University of Michigan, Ann Arbor. During my Ph.D. I was working in The Laboratory for PROGRESS headed by Prof. Chad Jenkins.
Prior to my Ph.D. I completed my Masters in Computer Science from the International Institute of Information Technology, Hyderabad, India, and Brown University. During my time at IIIT-Hyderabad, I was working in the Robotics Research Center headed by Dr K Madhava Krishna and was co-advised by Dr C V Jawahar from Center of Visual Information Technology (CVIT).
CV (updated Sept 2019'):
Publications (Google Scholar):
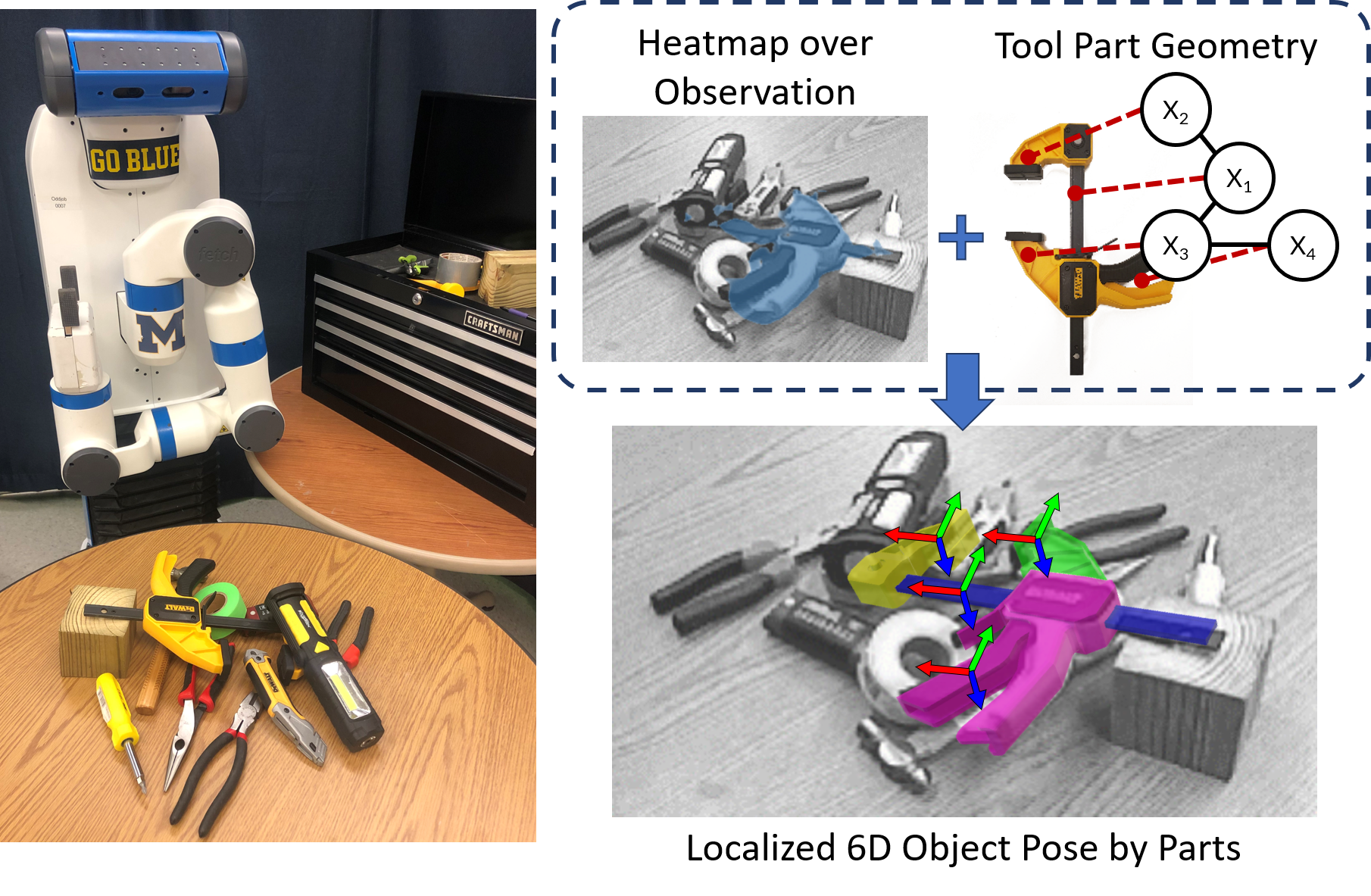 |
Jana Pavlasek, Stanley Lewis, Karthik Desingh, Odest Chadwicke Jenkins, "Parts-Based Articulated Object Localization in Clutter Using Belief Propagation," IROS 2020 (in press) (Acceptance 47.0%). [Bibtex] [Arxiv] [Video] [Project page] |
 |
Thomas Cohn, Odest Chadwicke Jenkins, Karthik Desingh, Zhen Zeng, "TSBP: Tangent Space Belief Propagation for Manifold Learning," IEEE Robotics and Automation Letters (RA-L) 2020 [Bibtex] [Paper] [Video] |
 |
Karthik Desingh, Shiyang Lu, Anthony Opipari, Odest Chadwicke Jenkins, "Efficient Nonparametric Belief Propagation for Pose Estimation and Manipulation of Articulated Objects," Science Robotics Journal May 2019 [Bibtex] [Article] [Media coverage] [FB livecast] |
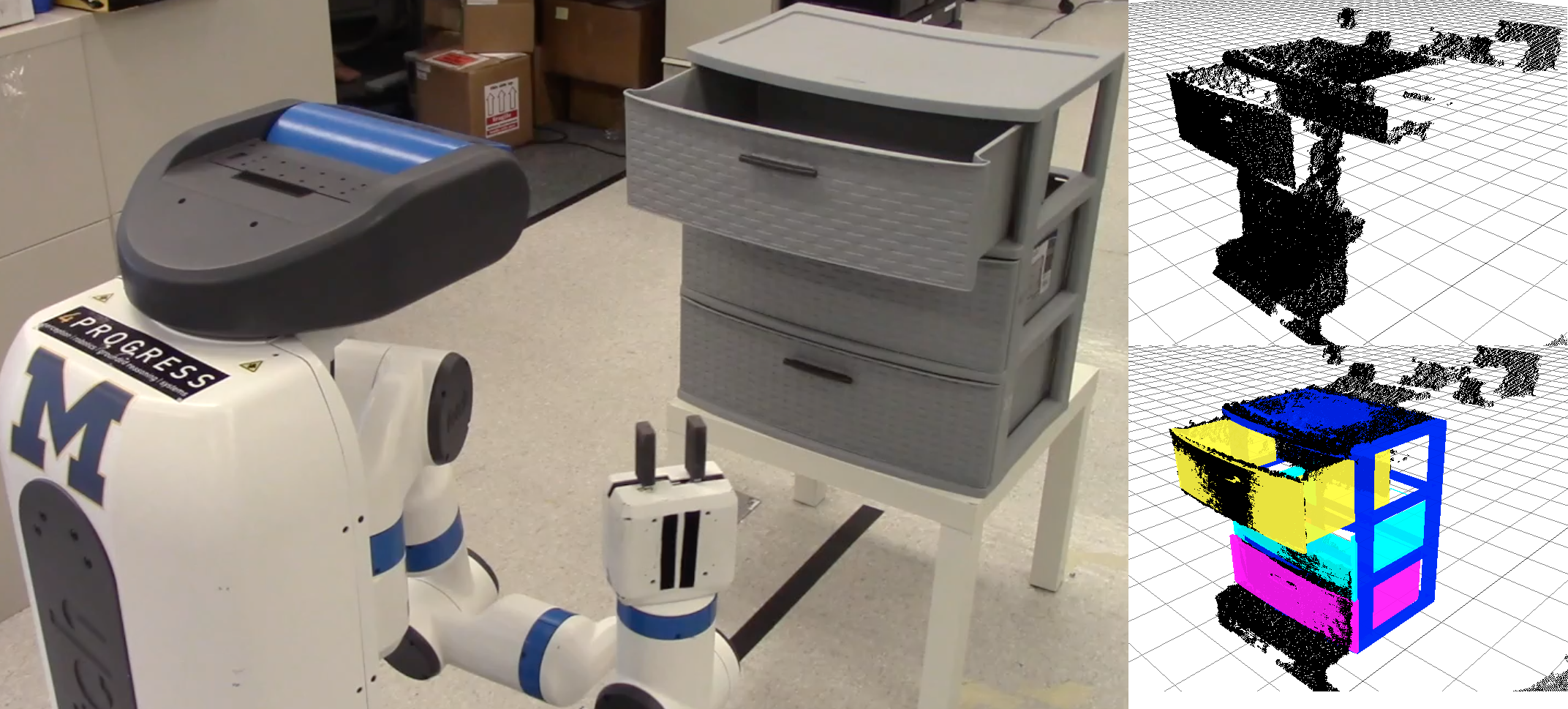 |
Karthik Desingh, Shiyang Lu, Anthony Opipari, Odest Chadwicke Jenkins, "Factored Pose Estimation of Articulated Objects using Efficient Nonparametric Belief Propagation," ICRA 2019 (Acceptance 44.0%). [Bibtex] [Paper] [Arxiv] [Video] |
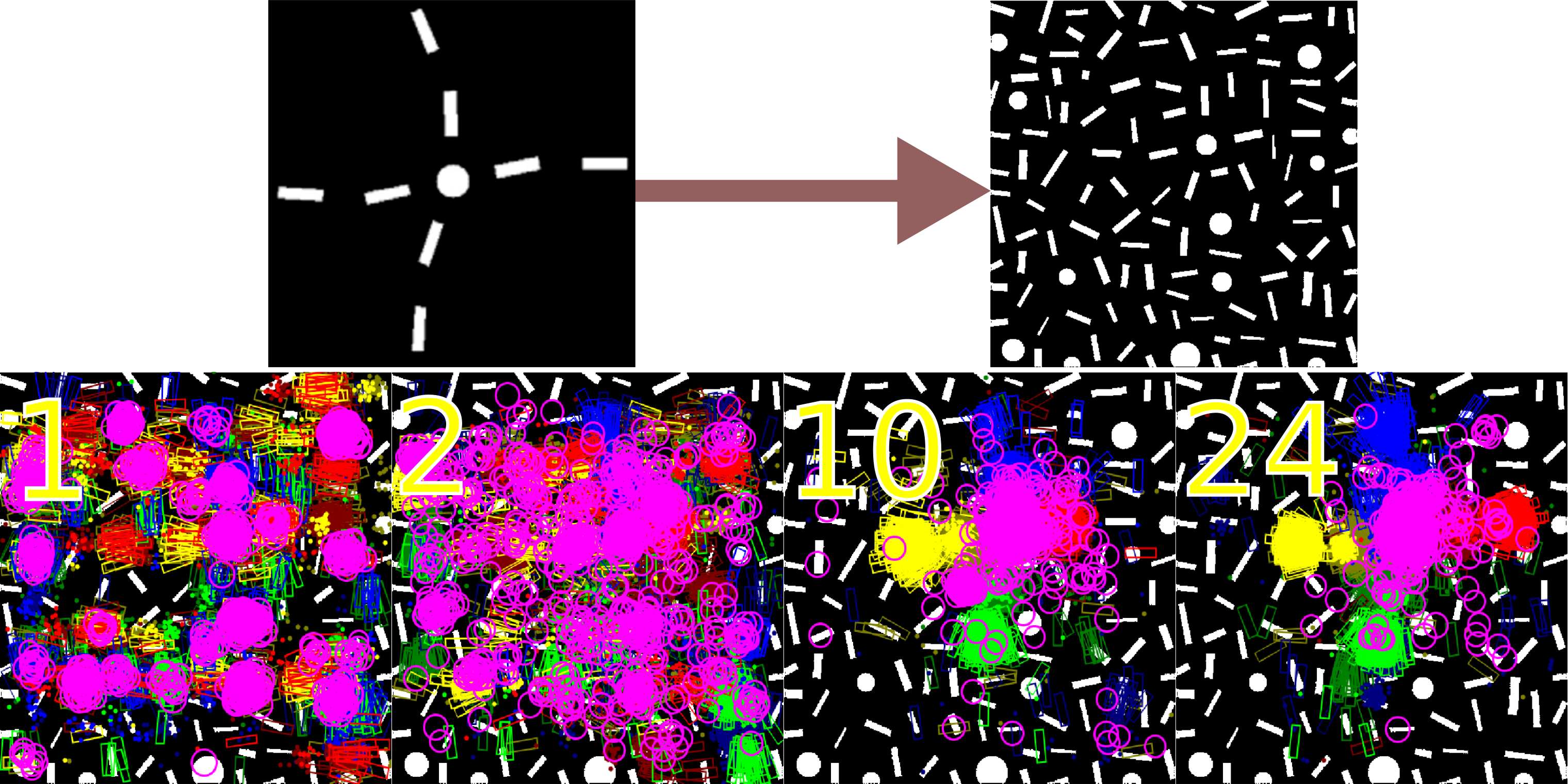 |
Karthik Desingh, Anthony Opipari, Odest Chadwicke Jenkins, "Pull Message Passing for Nonparametric Belief Propagation," arXiv 2018. [Bibtex] [Arxiv] |
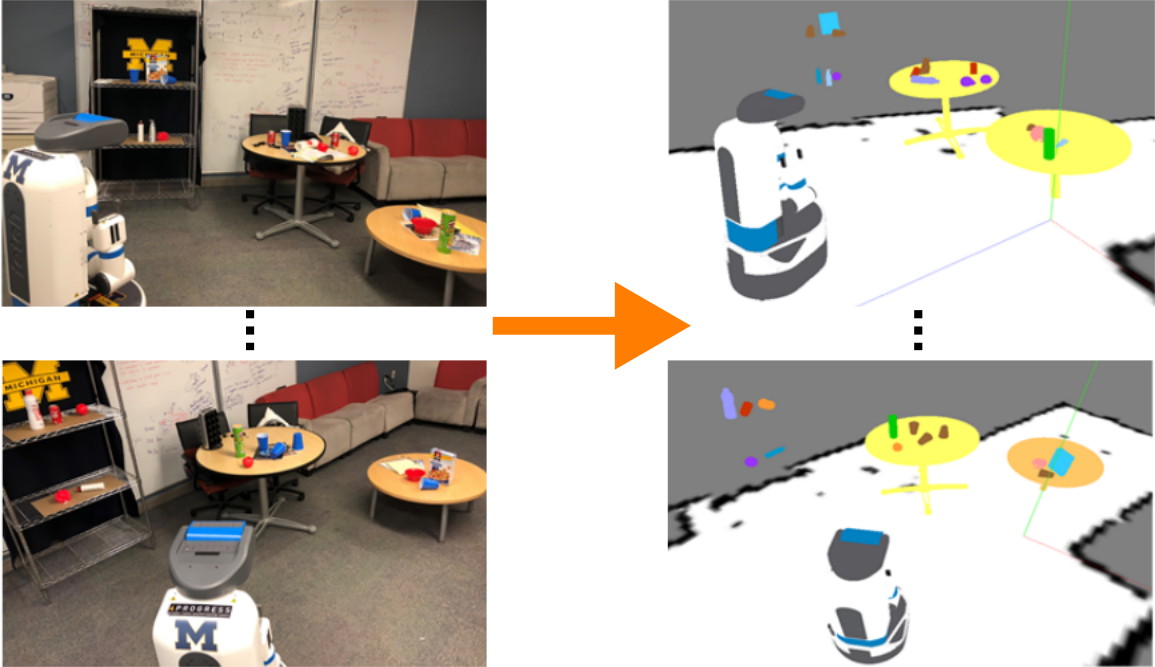 |
Zhen Zeng, Yunwen Zhou, Odest Chadwicke Jenkins, Karthik Desingh, "Semantic Mapping with Simultaneous Object Detection and Localization," IROS 2018 (Acceptance 46.7%). [Bibtex] [Arxiv] [Paper] [Video] |
 |
Sai R. Gouravajhala, Jinyeong Yim, Karthik Desingh, Yanda Huang, Odest Chadwicke Jenkins, Walter S. Lasecki, "EURECA: Enhanced Understanding of Real Environments via Crowd Assistance," In Proceedings of the AAAI Conference on Human Computation (HCOMP 2018). [Bibtex] [Paper] |
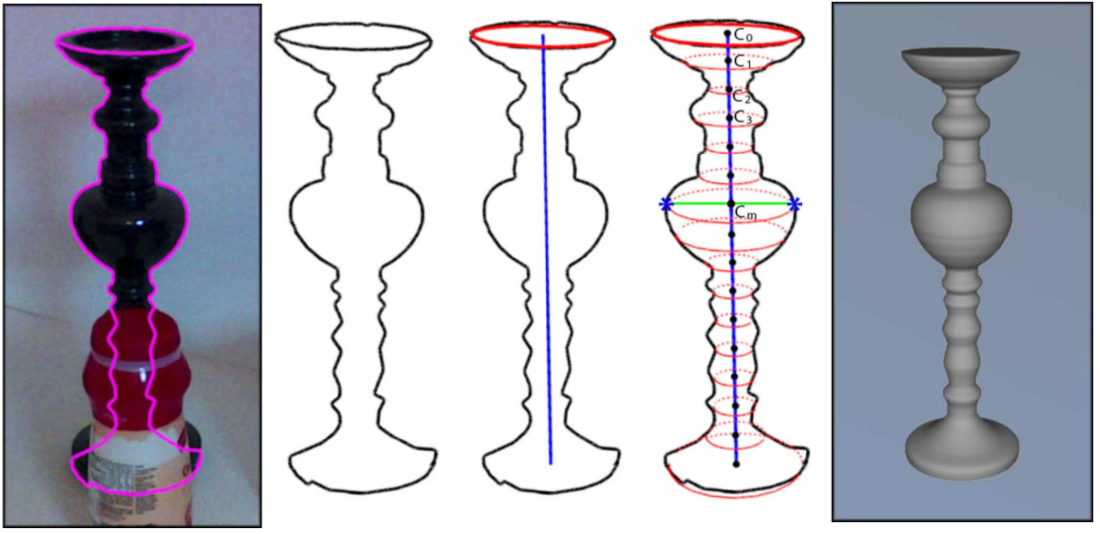 |
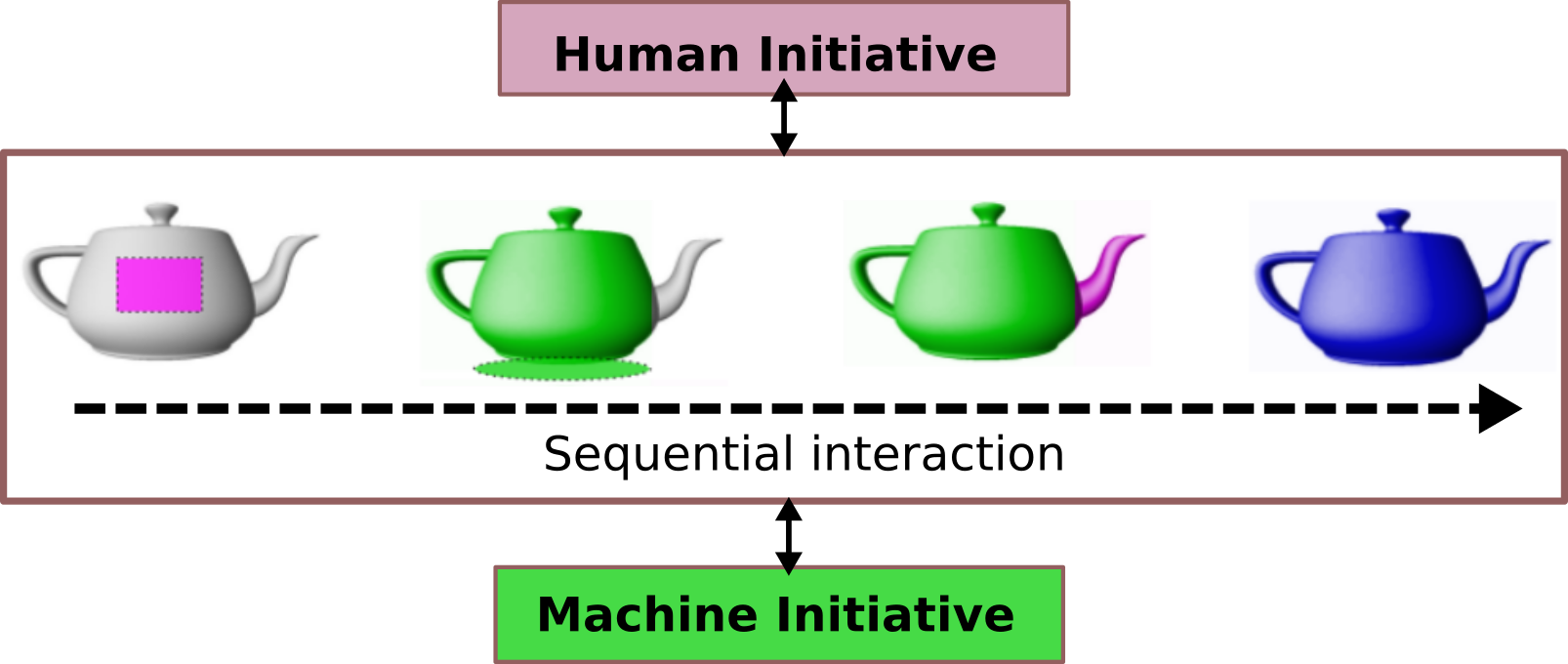
Mehran Maghoumi, Joseph LaViola, Karthik Desingh, Odest Chadwicke Jenkins, "GemSketch: Interactive Image-Guided Geometry Extraction from Point Clouds," ICRA 2018 (Acceptance 40.6%). [Bibtex] [Paper] [Video] [Poster] |
 |
Nediyana Daskalova, Karthik Desingh, Alexandra Papoutsaki, Diane Schulze, Heather Sha, Jeff Huang, "Lessons Learned from Two Cohorts of Personal Informatics Self-Experiments," UbiComp 2017. [Bibtex] [Paper] |
 |
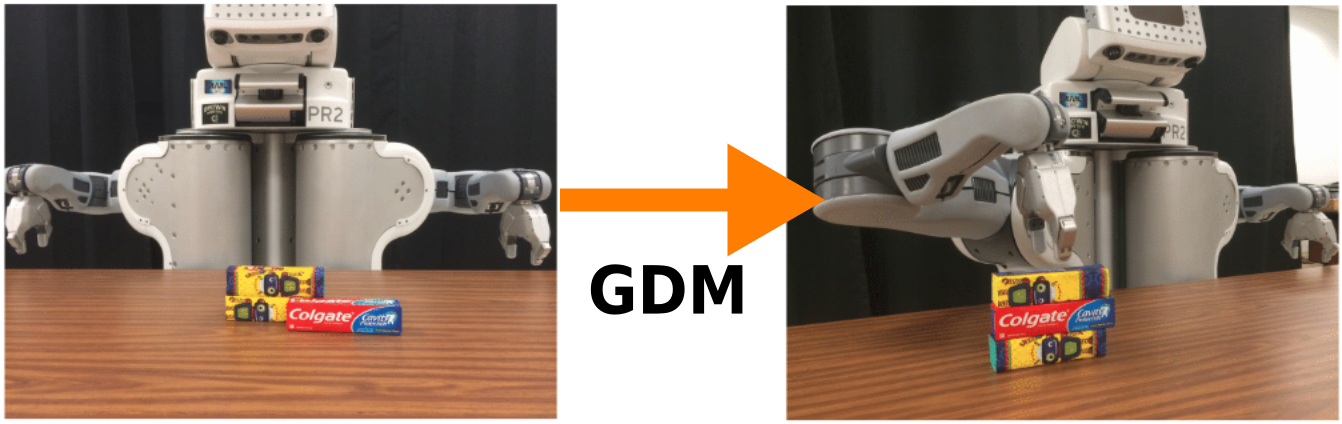
Zhiqiang Sui, Lingzhu Xiang, Odest Chadwicke Jenkins, Karthik Desingh, "Goal-directed Robot Manipulation through Axiomatic Scene Estimation," IJRR 2017. [Bibtex] [Paper] [Video] |
 |
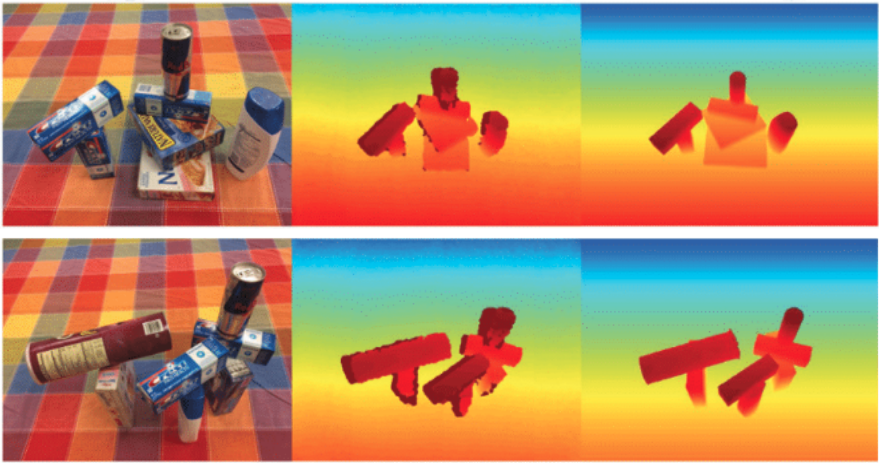
Karthik Desingh, Odest Chadwicke Jenkins, Lionel Reveret, Zhiqiang Sui, "Physically Plausible Scene Estimation for Manipulation in Clutter," Humanoids 2016. [Bibtex] [Paper] [Video] |
 |
Zhiqiang Sui, Odest Chadwicke Jenkins, Karthik Desingh, "Axiomatic Particle Filtering for Goal-Directed Robotic Manipulation," IROS 2015 (Acceptance 46%). [Bibtex] [Paper] [Video] |
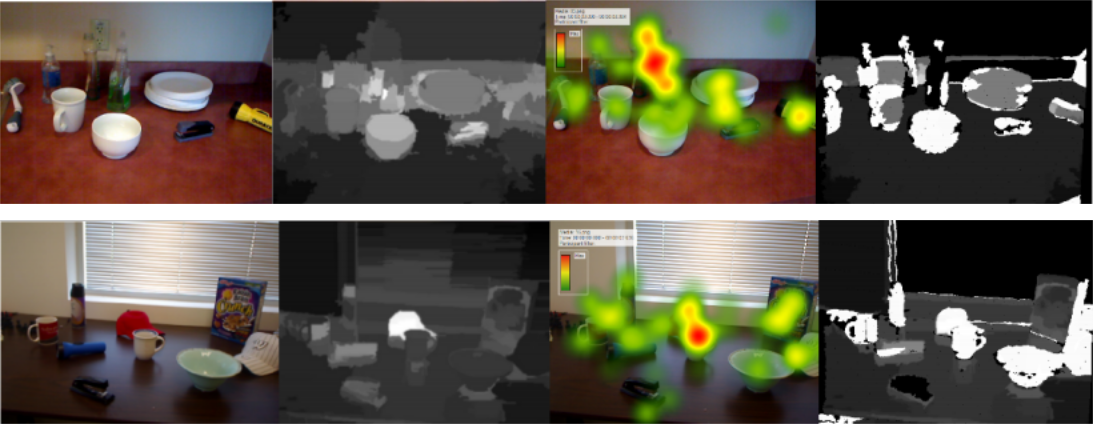 |
Karthik Desingh, K Madhava Krishna, Deepu Rajan, C V Jawahar, "Depth really Matters: Improving Visual Salient Region Detection with Depth," BMVC 2013 (Acceptance 30%). [Bibtex] [Paper] |
 |
Karthik Desingh, Akhil Nagariya, K Madhava Krishna, "Viewpoint based Mobile Robotic Exploration aiding Object Search in Indoor Environment," ICVGIP 2012 (Acceptance 30.5%). [Bibtex] [Paper] [Video] |
Workshops
- Karthik Desingh, Jana Pavlasek, Cigdem Kokenoz, Odest Chadwicke Jenkins,
"Tracking Large Scale Articulated Models with Belief Propagation for Task Informed Grasping and Manipulation,"
RSS 2019 Workshop: Task-Informed Grasping (TIG-II): From Perception to Physical Interaction.
[Extended Abstract] [Poster] [Best Workshop Paper Award] - Jana Pavlasek , Karthik Desingh, Odest Chadwicke Jenkins,
"Scene Understanding using Part-Based Object Affordances,"
RSS 2019 Workshop: Women in Robotics.
[Abstract] [Poster] - Sina Masnadi, Joseph J. LaViola Jr., Jana Pavlasek, Xiaofan Zhu, Karthik Desingh, Odest Chadwicke Jenkins,
"Sketching Affordances for Human-in-the-loop Robotic Manipulation Tasks,"
ICRA 2019 Workshop: 2nd Robot Teammates Operating in Dynamic, Unstructured Environments (RT-DUNE).
[Paper] - Karthik Desingh, Anthony Opipari, Odest Chadwicke Jenkins,
"Analysis of Goal-directed Manipulation in Clutter using Scene Graph Belief Propagation,"
ICRA 2018 Workshop: Multimodal Robot Perception - Perception, Inference and Learning for Joint Semantic, Geometric and Physical Understanding.
[Paper] - Karthik Desingh, Mehran Maghoumi, Odest Chadwicke Jenkins, Joseph J. LaViola and Lionel Reveret,
"Object Manipulation in Cluttered Scenes Informed by Physics and Sketching,"
RSS 2016 Workshop: Geometry and Beyond - Representations, Physics and Scene Understanding for Robotics.
[Paper] - Zhiqiang Sui, Odest Chadwicke Jenkins, Karthik Desingh,
"Axiomatic Scene Estimation for Robotic Manipulation,"
ICRA 2015 Workshop: Robotic Hands, Grasping and Manipulation.
Contact
Karthik Desingh
Paul G. Allen School of Computer Science & Engineering,
University of Washington,
Seattle, WA 98195-2350, USA
Mail: kdesingh(At)cs(dot)washington(dot)edu